0025 MPDTPU(M.2 E):修订间差异
无编辑摘要 |
|||
| 第421行: | 第421行: | ||
MPTPUD扩展板添加了电压、电流检测功能。使用本扩展板可以实时检测双TPU的电压、电流以及功率等数据。 | MPTPUD扩展板添加了电压、电流检测功能。使用本扩展板可以实时检测双TPU的电压、电流以及功率等数据。 | ||
1. 按照[[ | 1. 按照[[0025_MPTPUD(M.2_E)#5.2 打开I2C|5.2节]],在树莓派OS中打开打开I<sup>2</sup>C。 | ||
2. 执行下列命令,安装python库: | 2. 执行下列命令,安装python库: | ||
2024年9月18日 (三) 15:06的版本
关键词
树莓派5、PCIe、TPU、DTPU、Edge TPU、驱动安装、操作演示、AI、google、Coral、PCIe Switch、M.2 E key
一、简介
MPTPUD是一款专为树莓派5设计的双TPU扩展板,通过16Pin FPC接口连接至树莓派5,扩展板上通过一颗一扩二的PCIe Switch芯片来驱动双TPU模组。Coral的双TPU模组板载了两颗Google的Edge TPU处理器,使用了非标的M.2 E key接口。双TPU模组可提供8TOPS的总性能,能效为2TOPS每瓦。
二、硬件资源
1. 采用16Pin PCIe接口,板载一扩二PCIe Switch芯片;
2. 板载M.2 E-key接插件2230,支持双TPU模组;
3. TPU模组通过16Pin PCIe接口供电,也可通过40Pin接口供电;
4. 标配INA219电压电流采样电路,可监测双TPU运行功耗;
5. 配40Pin贴片母座,可搭配PC104接插件连接至树莓派5的40Pin插针;
6. 可选24C32 E2PROM,可用于存放设备初始化信息;
7. 尺寸:56x65mm,PCB板通过UL和ROHS认证,防火等级94V-0;;
8. 四层板设计,高效导热,标配导热硅胶垫,可选配散热片;
9. 可选配铝合金外壳。

三、系统烧写
3.1 本文档使用的镜像为2024-07-04-raspios-bookworm-arm64.img.xz(树莓派OS,Raspberry Pi OS with desktop)。
树莓派OS下载地址:
https://www.raspberrypi.com/software/operating-systems/#raspberry-pi-os-64-bit
3.2 系统烧写在SD(TF)卡上,点击直达烧写方法说明。
注意:烧写系统用的TF卡的容量至少为16G,否则可能会在安装配置过程中报空间不足!
四、树莓派OS下的驱动安装配置与演示
注意:此操作演示需要确保能稳定连通外网(需自备方法),否则许多文件无法下载或下载不全,最后可能会造成代码运行失败。
4.1 配置config.txt
系统启动后打开树莓派终端输入命令:
sudo nano /boot/firmware/config.txt
或者:
sudo mousepad /boot/firmware/config.txt
在文件最下方添加以下代码:
dtparam=pciex1
kernel=kernel8.img
dtoverlay=pineboards-hat-ai
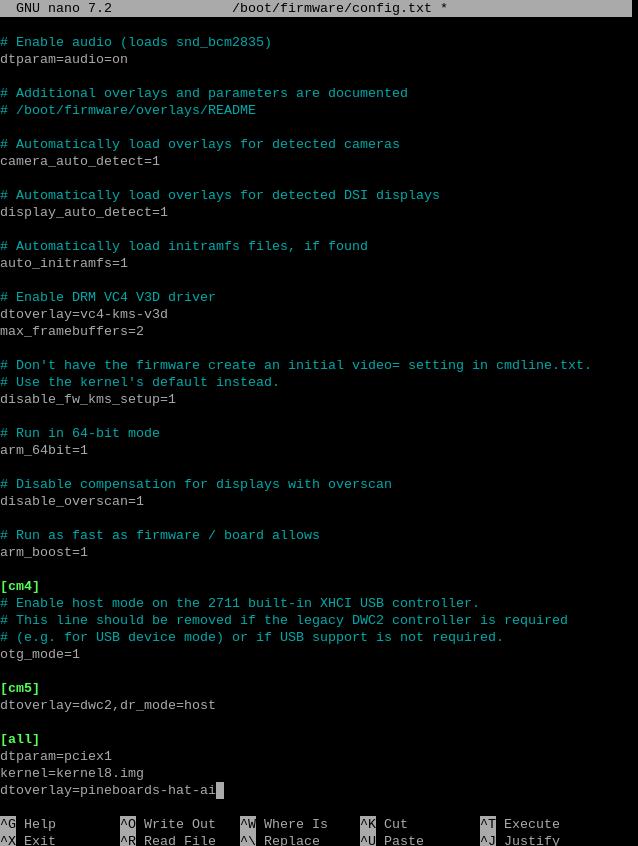
代码添加成功后,保存并重启系统:
sudo reboot
4.2 确认软件环境
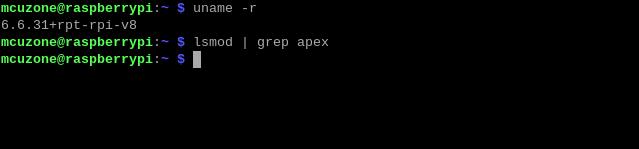
系统重启后打开打开树莓派终端输入命令:
uname -r
确保内核版本大于4.18后输入:
lsmod | grep apex
确保没有输出则可以开始安装TPU驱动。
4.3 安装必要软件
确保网络能连通外网(需自备方法)后,添加Google TPU软件库:
echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list
curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -

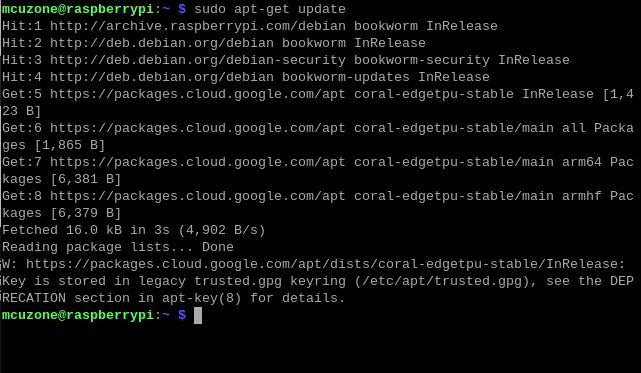
添加完成后更新软件列表:
sudo apt-get update
更新完成后安装必要的软件:
sudo apt-get install cmake libedgetpu1-std devscripts debhelper dkms dh-dkms

4.4 安装Gasket Driver
依次输入以下命令安装Gasket Driver:
git clone https://github.com/google/gasket-driver.git
cd gasket-driver
sudo debuild -us -uc -tc -b
cd ..
sudo dpkg -i gasket-dkms_1.0-18_all.deb

安装完成后输入以下命令确保驱动以及软件安装成功:
sudo apt-get install gasket-dkms libedgetpu1-std
接下来添加udev rule去获得设备操作权限:
sudo sh -c "echo 'SUBSYSTEM==\"apex\", MODE=\"0660\", GROUP=\"apex\"' >> /etc/udev/rules.d/65-apex.rules"
添加用户到apex:
sudo groupadd apex
sudo adduser $USER apex
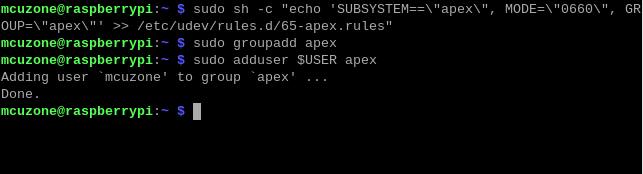
设置完成后重启系统:
sudo reboot
4.5 验证模块检测以及驱动安装
系统启动后验证模块检测以及驱动安装:
lspci -nn | grep 089a
ls /dev/apex_0

这里板载双TPU,因此可以看到两个TPU模块。
输入sudo lspci -v可以看到驱动加载,同样有两个TPU模块的驱动:
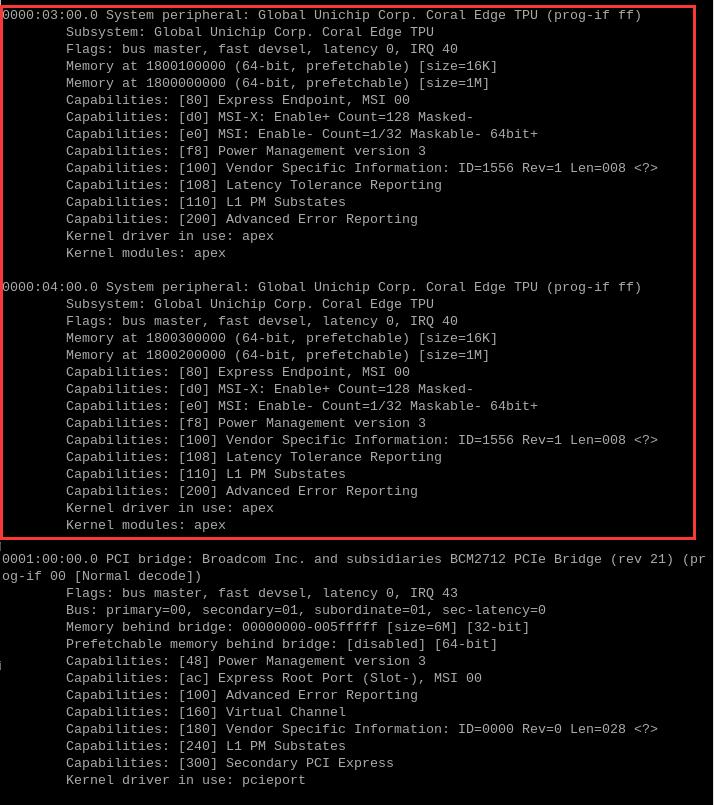
4.6 代码运行环境配置
Google TPU模块代码运行需要在Python3.6-3.9之间,而树莓派最新系统的Python版本为3.11,因此我们需要使用Pyenv来下载老版本Python。
首先进行依赖安装:
sudo apt-get install -y make build-essential libssl-dev zlib1g-dev \libbz2-dev libreadline-dev libsqlite3-dev wget curl llvm libncurses5-dev \libncursesw5-dev xz-utils tk-dev libffi-dev liblzma-dev python3-openssl

依赖安装完成后进行pyenv的安装:
curl https://pyenv.run | bash

输入:
sudo nano ~/.bashrc
或者:
sudo mousepad ~/.bashrc
在文件最下面添加以下代码:
export PYENV_ROOT="$HOME/.pyenv"
[[ -d $PYENV_ROOT/bin ]] && export PATH="$PYENV_ROOT/bin:$PATH"
eval "$(pyenv init -)"
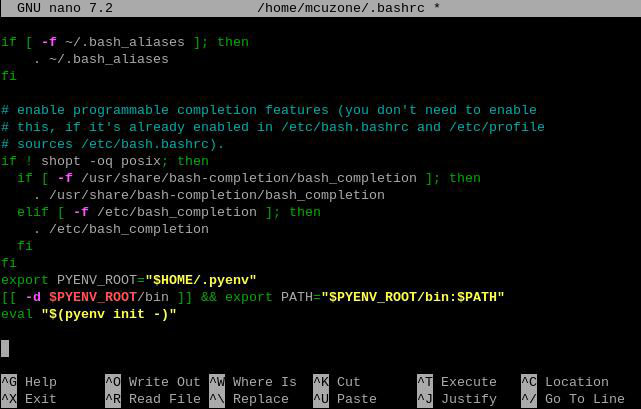
添加完成后保存退出并重新加载shell:
exec "$SHELL"

接下来我们可以利用pyenv安装老系统版本Python:
pyenv install -v 3.8.8


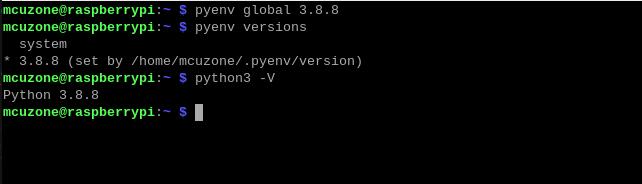
等待安装成功后我们将系统Python版本更改为3.8.8:
pyenv global 3.8.8
更改成功后可以查看当前Python使用版本为3.8.8:
pyenv versions
python3 -V
4.7 下载代码和运行模组
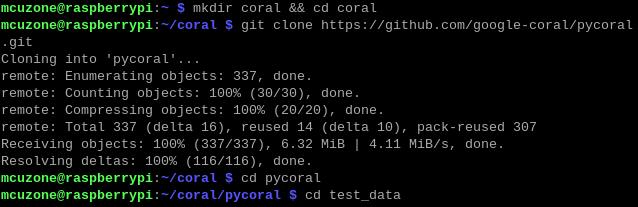
依次输入以下命令进行下载:
mkdir coral && cd coral
git clone https://github.com/google-coral/pycoral.git
cd pycoral
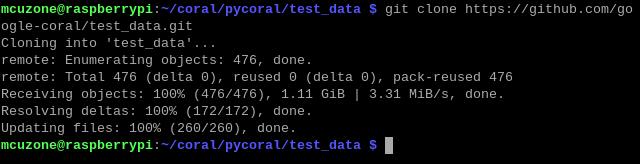
cd test_data
git clone https://github.com/google-coral/test_data.git
接下来下载代码运行模组
pip3 install numpy
pip3 install Pillow

pip3 install --extra-index-url https://google-coral.github.io/py-repo/ pycoral
4.8 运行代码
模组下载完成后返回 coral/pycoral路径下
cd ..
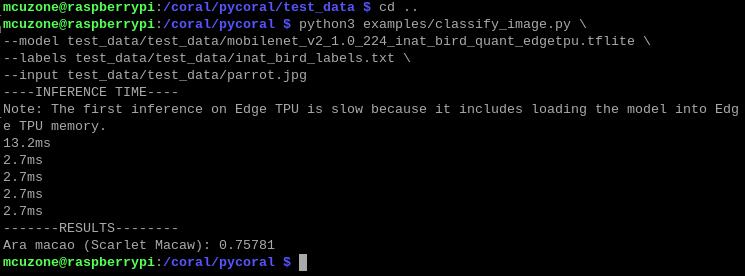
4.8.1 单TPU运行单模型
输入以下代码进行代码运行

注意:我们可以复制下列代码,但是请先粘贴到文本软件中,按照上图的格式,删除多余的回车符,再复制然后粘贴到终端中运行:
python3 examples/classify_image.py \
--model test_data/test_data/mobilenet_v2_1.0_224_inat_bird_quant_edgetpu.tflite \
--labels test_data/test_data/inat_bird_labels.txt \
--input test_data/test_data/parrot.jpg
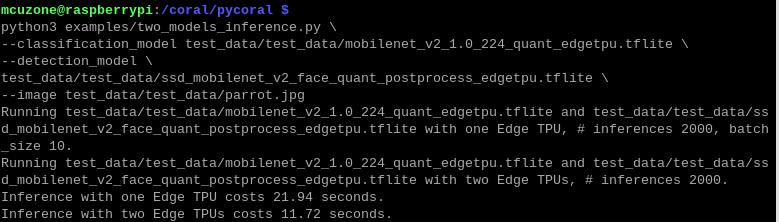
4.8.2 双TPU运行多模型
输入以下代码进行代码运行

注意:我们可以复制下列代码,但是请先粘贴到文本软件中,按照上图的格式,删除多余的回车符,再复制然后粘贴到终端中运行:
python3 examples/two_models_inference.py \
--classification_model test_data/mobilenet_v2_1.0_224_quant_edgetpu.tflite \
--detection_model \
test_data/ssd_mobilenet_v2_face_quant_postprocess_edgetpu.tflite \
--image test_data/parrot.jpg
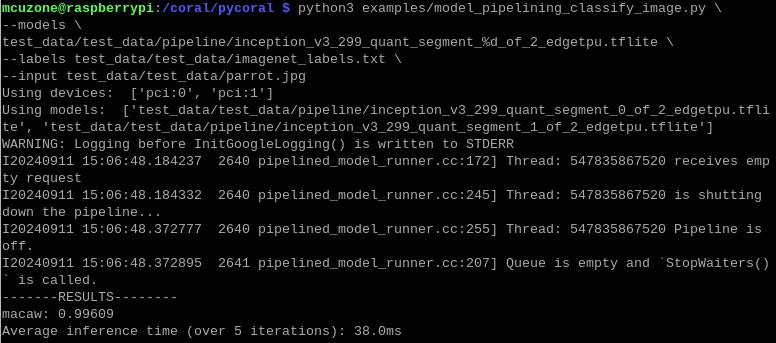
4.8.3 双TPU运行单模型
输入以下代码进行代码运行

注意:我们可以复制下列代码,但是请先粘贴到文本软件中,按照上图的格式,删除多余的回车符,再复制然后粘贴到终端中运行:
python3 examples/model_pipelining_classify_image.py \
--models \
test_data/pipeline/inception_v3_299_quant_segment_%d_of_2_edgetpu.tflite \
--labels test_data/imagenet_labels.txt \
--input test_data/parrot.jpg
鉴于本开发板的测试需要在外网下载大量数据,为了方便用户进行测试,用户在购买本开发板后,可以联系我司获取已经配置完毕的树莓派OS镜像。
五、E2PROM芯片烧写操作演示
5.1 概述
MPTPUD扩展板板载E2PROM芯片。树莓派系统在启动过程中会通过I2C引脚查找E2PROM并读取E2PROM信息,因此我们可以向E2PROM芯片烧写我们需要的信息以及设备树文件,以此来实现配置信息自动加载的功能。
注意,烧写过程中需要连接外网,请保持网络畅通。
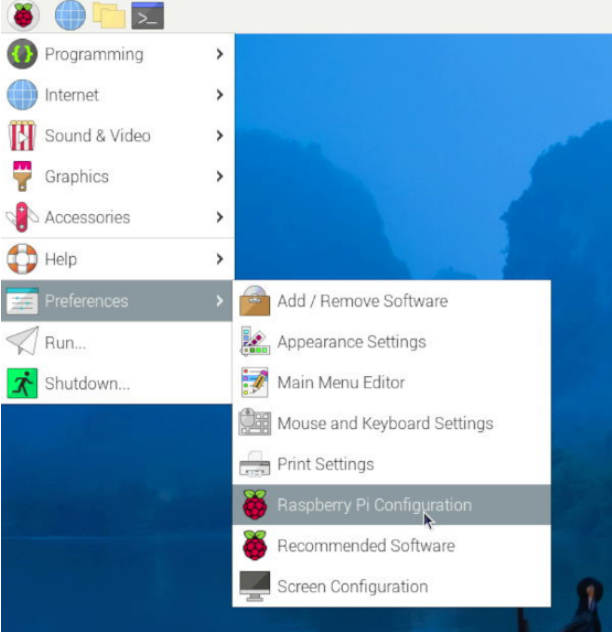
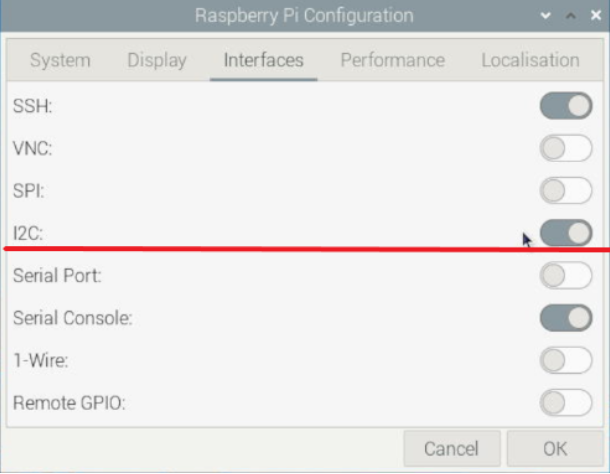
5.2 打开I2C
依次选择如下图项目后,打开I2C后,然后重启树莓派OS。
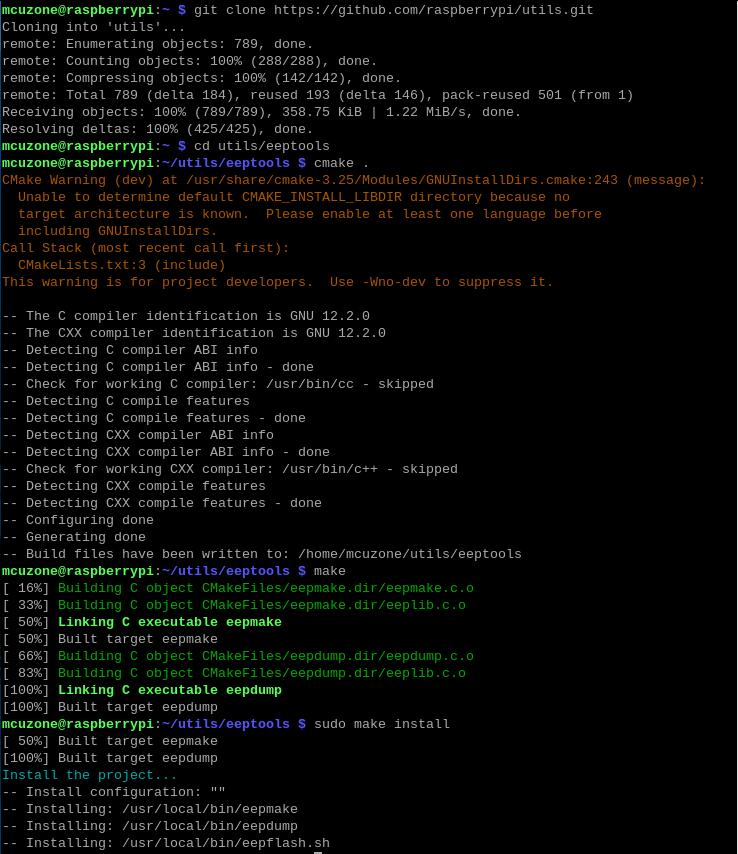
5.3 安装工具
输入以下命令安装工具:
git clone https://github.com/raspberrypi/utils.git
cd utils/eeptools
cmake .
make
sudo make install
下载和放置i2c-gpio.dtbo文件:
wget http://www.mcuzone.com/wiki/0025_MPTPUD/i2c-gpio.zip
unzip i2c-gpio.zip
sudo cp i2c-gpio.dtbo /boot/overlays
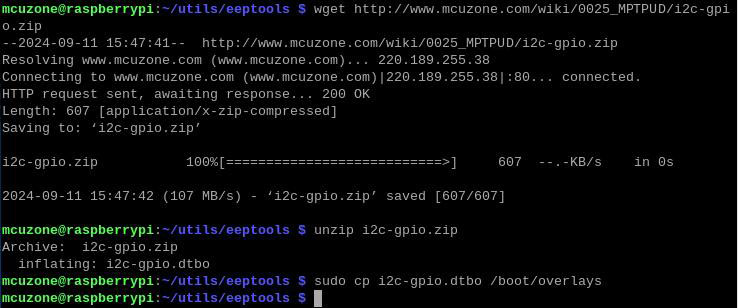
完成后重启系统:
sudo reboot
5.4 编辑配置文件
执行下列命令:
cd utils/eeptools
sudo mousepad eeprom_settings.txt

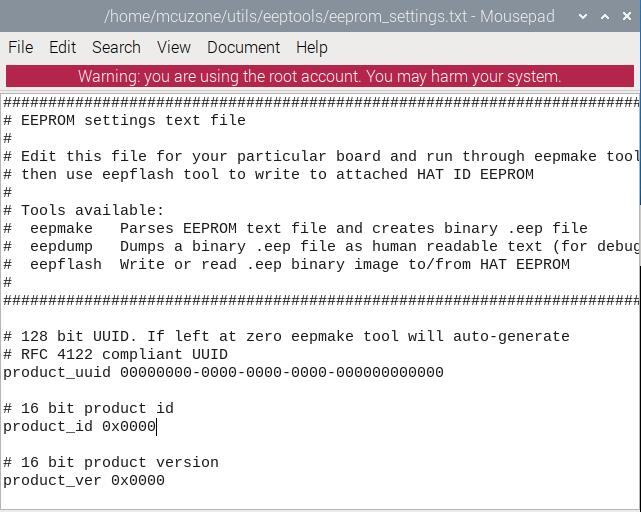
复制eeprom_settinggs.txt文件的所有内容后退出。
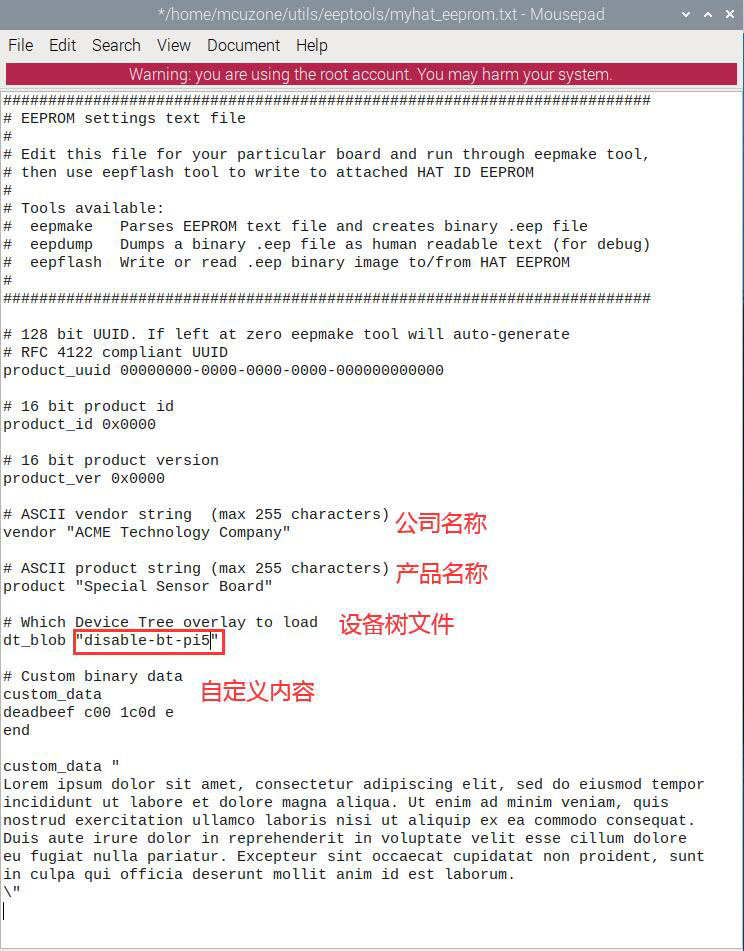
然后执行:
sudo mousepad myhat_eeprom.txt

创建myhat_eeprom.txt文件,将刚才复制的文本粘贴到里面,红字段落的内容可以自定义修改,在当前演示,我们将设备树文件修改为关闭蓝牙,即把设备树改为disable-bt-pi5,修改完毕后保存文件并退出:
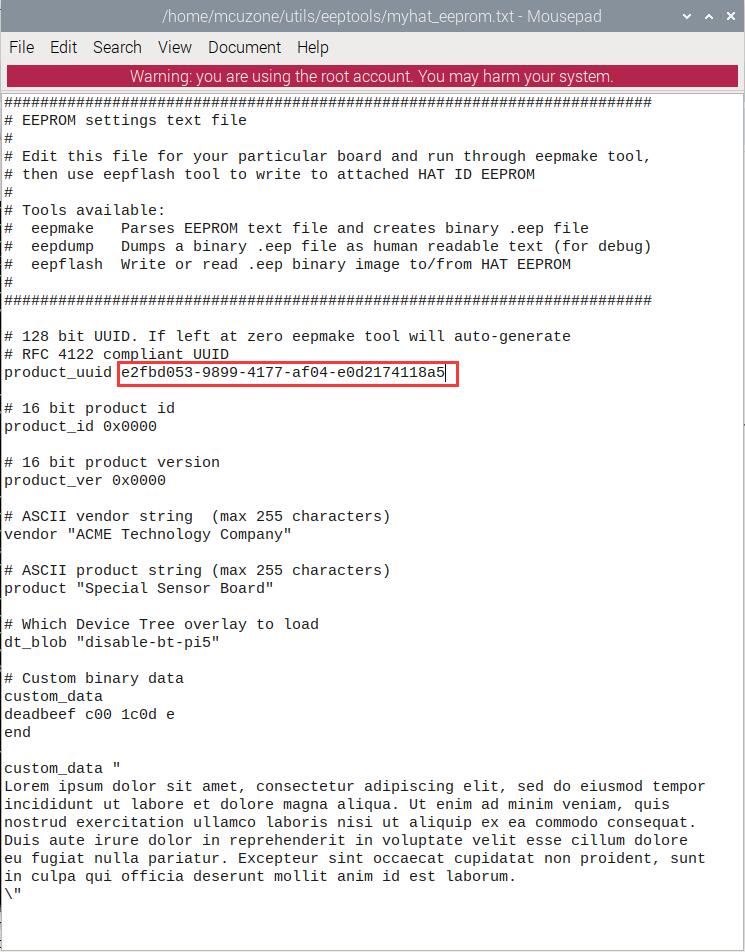
随后使用E2PROM工具生成UUID:
eepmake myhat_eeprom.txt myhat.eep

将产生的UUID修改到myhat_eeprom.txt,然后保存并退出:
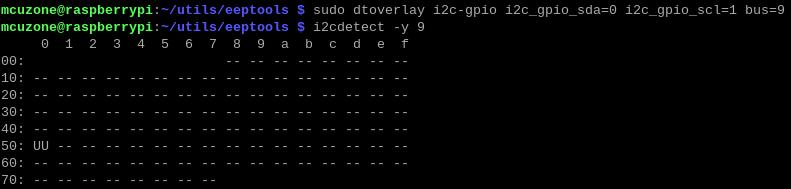
输入以下命令使能I2C-9,并查看结果:
sudo dtoverlay i2c-gpio i2c_gpio_sda=0 i2c_gpio_scl=1 bus=9
i2cdetect -y 9
修改eepflash.sh内容地址为0050:
sudo nano eepflash.sh

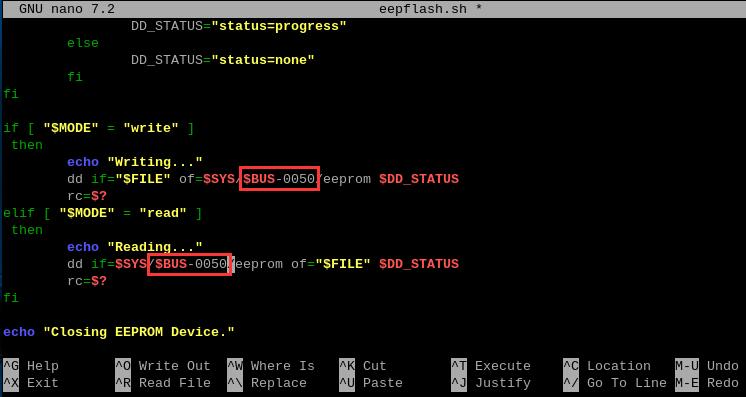
保存并退出。
5.5 烧写E2PROM
输入以下命令烧写E2PROM:
sudo ./eepflash.sh -w -t=24c32 -a=0x50 -f=myhat.eep
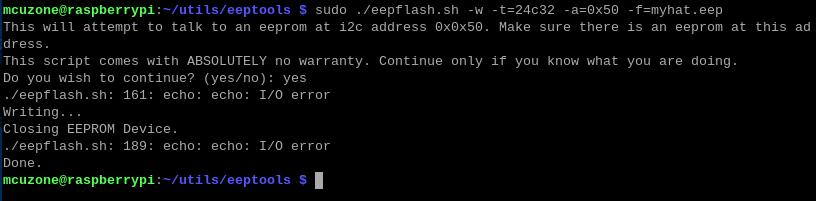
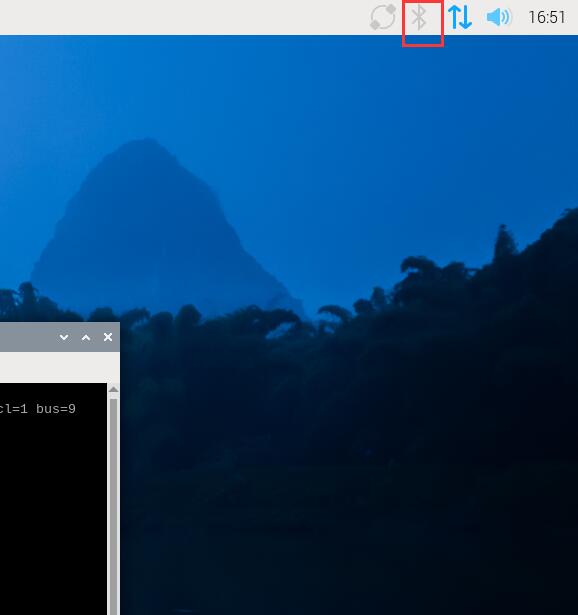
烧写完成后重启系统,即可看到蓝牙被禁用:
六、电压电流监测功能演示
MPTPUD扩展板添加了电压、电流检测功能。使用本扩展板可以实时检测双TPU的电压、电流以及功率等数据。
1. 按照5.2节,在树莓派OS中打开打开I2C。
2. 执行下列命令,安装python库:
pip3 intsall smbus
3. 执行下列命令,下载监测软件:
wget http://www.mcuzone.com/wiki/0025_MPTPUD/INA219.zip
unzip INA219.zip
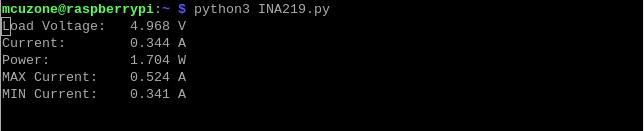
4. 运行监测软件:
python3 INA219.py
不插TPU模块:

插TPU模块静态:

单TPU运行:
双TPU同时运行:

在双TPU同时运行时,可以看到最大电流已经升至0.912A,对应约4.527W功率,双TPU同时工作时功率基本是单TPU工作的功率(最大电流0.524A,对应约2.603W功率)的大约两倍。
联系我们




 QQ:8204136
QQ:8204136
电话:13957118045
如本页面有任何疏漏、错误或者侵权,请通过上述途径联系我们,谢谢!
Copyright 2004-2024 野芯科技